 |
ProtoTracer
1.0
Real-time 3D rendering and animation engine
|
|
ProtoTracer
1.0
Real-time 3D rendering and animation engine
|
Base class for managing camera properties and transformations. More...
#include <CameraBase.h>
Public Member Functions | |
| CameraBase () | |
| Default constructor. | |
| virtual Vector2D | GetCameraMinCoordinate ()=0 |
| Retrieves the minimum coordinate of the camera in 2D space. | |
| virtual Vector2D | GetCameraMaxCoordinate ()=0 |
| Retrieves the maximum coordinate of the camera in 2D space. | |
| virtual Vector2D | GetCameraCenterCoordinate ()=0 |
| Retrieves the center coordinate of the camera in 2D space. | |
| virtual Vector3D | GetCameraTransformMin ()=0 |
| Retrieves the minimum transform of the camera in 3D space. | |
| virtual Vector3D | GetCameraTransformMax ()=0 |
| Retrieves the maximum transform of the camera in 3D space. | |
| virtual Vector3D | GetCameraTransformCenter ()=0 |
| Retrieves the center transform of the camera in 3D space. | |
| virtual IPixelGroup * | GetPixelGroup ()=0 |
| Retrieves the associated pixel group. | |
| CameraLayout * | GetCameraLayout () |
| Retrieves the camera's layout. | |
| Transform * | GetTransform () |
| Retrieves the camera's transformation data. | |
| bool | Is2D () |
| Checks if the camera operates in 2D mode. | |
| void | Set2D (bool is2D) |
| Sets the camera's 2D mode. | |
| void | SetLookOffset (Quaternion lookOffset) |
| Sets the camera's look offset. | |
| Quaternion | GetLookOffset () |
| Retrieves the camera's look offset. | |
Protected Attributes | |
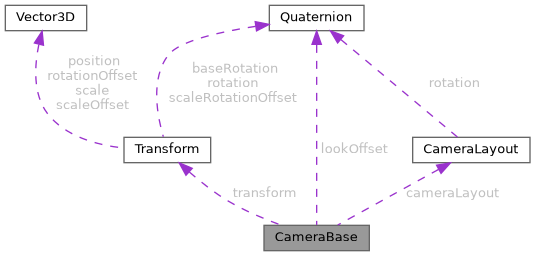
| Transform * | transform |
| Pointer to the camera's transformation data. | |
| CameraLayout * | cameraLayout |
| Pointer to the camera's layout information. | |
| Quaternion | lookOffset |
| Look offset for the camera's orientation. | |
| bool | is2D = false |
| Flag indicating whether the camera operates in 2D mode. | |
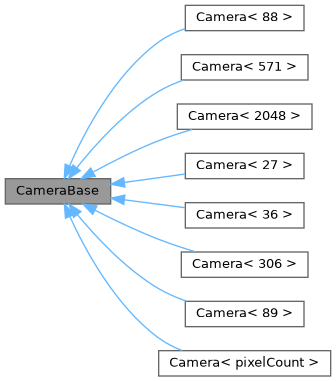
Base class for managing camera properties and transformations.
The CameraBase class provides an abstract interface for camera operations, including retrieving camera bounds and transformations, and managing associated pixel groups.
Definition at line 26 of file CameraBase.h.
| CameraBase | ( | ) |
Default constructor.
Definition at line 3 of file CameraBase.cpp.
Retrieves the center coordinate of the camera in 2D space.
Implemented in Camera< pixelCount >, Camera< 2048 >, Camera< 27 >, Camera< 306 >, Camera< 36 >, Camera< 571 >, Camera< 88 >, and Camera< 89 >.
| CameraLayout * GetCameraLayout | ( | ) |
Retrieves the camera's layout.
Definition at line 5 of file CameraBase.cpp.
References cameraLayout.
Referenced by Rasterizer::Rasterize().
Retrieves the maximum coordinate of the camera in 2D space.
Implemented in Camera< pixelCount >, Camera< 2048 >, Camera< 27 >, Camera< 306 >, Camera< 36 >, Camera< 571 >, Camera< 88 >, and Camera< 89 >.
Referenced by Rasterizer::Rasterize().
Retrieves the minimum coordinate of the camera in 2D space.
Implemented in Camera< pixelCount >, Camera< 2048 >, Camera< 27 >, Camera< 306 >, Camera< 36 >, Camera< 571 >, Camera< 88 >, and Camera< 89 >.
Referenced by Rasterizer::Rasterize().
Retrieves the center transform of the camera in 3D space.
Implemented in Camera< pixelCount >, Camera< 2048 >, Camera< 27 >, Camera< 306 >, Camera< 36 >, Camera< 571 >, Camera< 88 >, and Camera< 89 >.
Retrieves the maximum transform of the camera in 3D space.
Implemented in Camera< pixelCount >, Camera< 2048 >, Camera< 27 >, Camera< 306 >, Camera< 36 >, Camera< 571 >, Camera< 88 >, and Camera< 89 >.
Retrieves the minimum transform of the camera in 3D space.
Implemented in Camera< pixelCount >, Camera< 2048 >, Camera< 27 >, Camera< 306 >, Camera< 36 >, Camera< 571 >, Camera< 88 >, and Camera< 89 >.
| Quaternion GetLookOffset | ( | ) |
Retrieves the camera's look offset.
Definition at line 25 of file CameraBase.cpp.
References lookOffset.
Referenced by Rasterizer::Rasterize().
|
pure virtual |
Retrieves the associated pixel group.
Implemented in Camera< pixelCount >, Camera< 2048 >, Camera< 27 >, Camera< 306 >, Camera< 36 >, Camera< 571 >, Camera< 88 >, and Camera< 89 >.
Referenced by APA102Controller::Display(), HUB75Controller::Display(), HUB75ControllerSplit::Display(), HUB75ControllerSquare::Display(), WS35BetaController::Display(), WS35Controller::Display(), DisplayTest::FillAltWhiteBlack(), DisplayTest::FillWhite(), Rasterizer::Rasterize(), and RenderingEngine::Rasterize().
| Transform * GetTransform | ( | ) |
Retrieves the camera's transformation data.
Definition at line 9 of file CameraBase.cpp.
References transform.
Referenced by Rasterizer::Rasterize().
| bool Is2D | ( | ) |
Checks if the camera operates in 2D mode.
Definition at line 13 of file CameraBase.cpp.
References is2D.
Referenced by Rasterizer::Rasterize().
Sets the camera's 2D mode.
| is2D | True to enable 2D mode, otherwise false. |
Definition at line 17 of file CameraBase.cpp.
References is2D.
| void SetLookOffset | ( | Quaternion | lookOffset | ) |
Sets the camera's look offset.
| lookOffset | The new look offset as a Quaternion. |
Definition at line 21 of file CameraBase.cpp.
References lookOffset.
|
protected |
Pointer to the camera's layout information.
Definition at line 29 of file CameraBase.h.
Referenced by GetCameraLayout().
Flag indicating whether the camera operates in 2D mode.
Definition at line 31 of file CameraBase.h.
|
protected |
Look offset for the camera's orientation.
Definition at line 30 of file CameraBase.h.
Referenced by GetLookOffset(), and SetLookOffset().
|
protected |
Pointer to the camera's transformation data.
Definition at line 28 of file CameraBase.h.
Referenced by GetTransform().