 |
ProtoTracer
1.0
Real-time 3D rendering and animation engine
|
|
ProtoTracer
1.0
Real-time 3D rendering and animation engine
|
Encapsulates a 3D rotation using Euler angles and a specific order of application. More...
#include <EulerAngles.h>
Public Member Functions | |
| EulerAngles () | |
| Default constructor that initializes angles to zero and order to a default value. | |
| EulerAngles (Vector3D angles, EulerOrder order) | |
Constructs an EulerAngles object with specified angles and order. | |
| String | ToString () |
Converts the EulerAngles object to a string representation. | |
Public Attributes | |
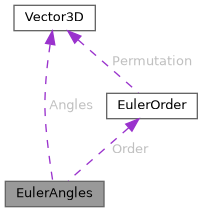
| Vector3D | Angles |
| The three rotation angles (pitch, yaw, roll) in degrees (or radians based on usage). | |
| EulerOrder | Order |
| The order in which the angles are applied (e.g., XYZ, ZYX, etc.). | |
Encapsulates a 3D rotation using Euler angles and a specific order of application.
Euler angles are commonly used to represent rotations in 3D space by specifying three angles applied in a specific sequence. The sequence is defined by the EulerOrder.
Definition at line 25 of file EulerAngles.h.
| EulerAngles | ( | ) |
Default constructor that initializes angles to zero and order to a default value.
Definition at line 5 of file EulerAngles.cpp.
| EulerAngles | ( | Vector3D | angles, |
| EulerOrder | order | ||
| ) |
Constructs an EulerAngles object with specified angles and order.
| angles | The rotation angles as a Vector3D (e.g., pitch, yaw, roll). |
| order | The order in which the angles are applied, represented by EulerOrder. |
Definition at line 9 of file EulerAngles.cpp.
| String ToString | ( | ) |
Converts the EulerAngles object to a string representation.
Useful for debugging and visualizing the rotation angles and order.
EulerAngles in the format "(angles: [X, Y, Z], order: XYZ)". Definition at line 13 of file EulerAngles.cpp.
References Angles, Order, EulerOrder::ToString(), and Vector3D::ToString().
| Vector3D Angles |
The three rotation angles (pitch, yaw, roll) in degrees (or radians based on usage).
Definition at line 27 of file EulerAngles.h.
Referenced by ToString(), and Transform::ToString().
| EulerOrder Order |
The order in which the angles are applied (e.g., XYZ, ZYX, etc.).
Definition at line 28 of file EulerAngles.h.
Referenced by ToString().